FANUC R-30iB Mate
Normally, as part of a system, a robot can move when it receives an “OK to move” signal from an external device such as a PLC (signals indicating IMSTP, HOLD, SFSPD, and ENBL are on). However, there are many cases where you want to operate the robot independently before assembling the system.
In such cases, you can take control by setting “Enable UI signals:” to FALSE in [SYSTEM] -> [Config].
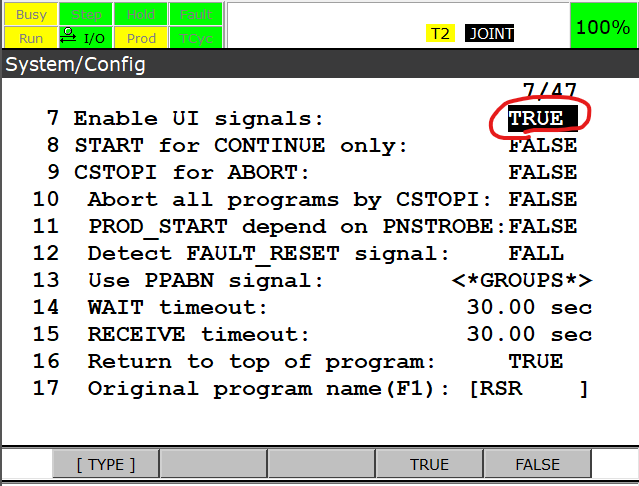
Don’t forget to “TRUE” it again when the device is assembled.


コメント